
Camera and Lens Calibration
- Terry Tham

- Aug 27, 2020
- 3 min read
Objects to inspect often place in a different angle and pose. To obtain a high accuracy measurement, camera plane and pose are required. With Squidify System, it is possible to measure objects that lie in a plane, even when the plane is tilted with respect to the
optical axis. The only prerequisite is that the camera has been calibrated. In this example, the calibration process is performed using a 5MP, 1/2.5' CMOS sensor, a 8.0mm focal length of CCD lens, and standard calibration plate (80 mm glass).
Preparation before performing the calibration
Required information from the camera and lens we need are:
Camera type: Area scan camera
Lens focal length: 8.0 mm
Image width & height: 2592px (width) x 1944px (height)
Simply click a calibration utility tool, a calibration steps procedure window will pop-out, fill up necessary information and click continue to next step.

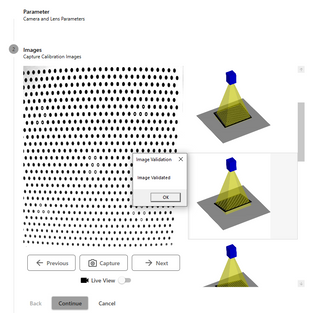
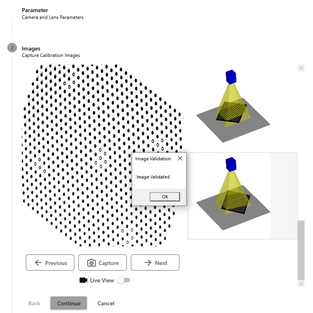
Observing the calibration object in multiple pose (Images)
The main input data for the calibration are the so-called observations. For this, the calibration object is placed in different poses. For each pose, simple click "Capture" button and validate for a sequential pose image acquisition.












If you want to achieve accurate results, please follow the recommendations given in this section:
Use a clean calibration plate.
The calibration plate should cover at least a third of the field of view for calibration plates with hexagonally arranged marks. For calibration plates with rectangularly arranged marks the calibration plate should cover at least a quarter of the field of view.
For calibration plates with hexagonally arranged marks at least one finder pattern must be completely visible in the image. If at least two finder patterns are visible, it is possible to detect whether the calibration plate is mirrored or not. For calibration plates with rectangularly arranged marks, the calibration plate must be completely visible inside the image.
The diameter of a calibration mark should be at least 20 pixels.
Use an illumination where the calibration plate is homogeneous.
The contrast between the light and the dark parts of the calibration plate should be more than 100 gray values.
The light parts of the calibration plate should have a gray value of at least 100.
The images must not be overexposed (the gray values of the light parts of the image should be strictly below 255).
For calibration plates with rectangularly arranged marks, use an illumination where the background is darker than the calibration plate.
The images should contain as little noise as possible.
The images should be sharply focused, i.e., transitions between objects should be clearly delimited.
Place the calibration plate in all areas of the field of view at least once. Vary the orientations of the calibration plate. This includes rotations around the x- and y-axis of the calibration plate, such that the perspective distortions of the calibration pattern are clearly visible. Without some tilted calibration plates the focal length can not be calculated properly (a tilt angle of approximately 45 degrees is recommended).
Performing the calibration

Calibration calculates the internal and external camera parameters. The root mean square error (RMSE) of the back projection of the optimization is returned in error (in pixels). The error gives a general indication whether the optimization was successful. An error of up to 0.1 pixels indicates that the calibration was successful, otherwise, rectify setup parameters and re-try again.
Applying calibration result to rectify captured image distortion before perform pixel precise measurement.
Original image captured:

After applying calibration result

Closing
In general, calibration is to obtaining camera setup and pose relative to the world coordinate, and camera and lens internal characteristic. Images acquired that affected by these characteristic can be eliminate for performing accurate sub-pixel measurement.
By Rachel Lee



Comments